دیتاشیت فارسی L298
بهترین درایور موتور
[External Link Removed for Guests]
L298
مدیران انجمن: sinaset, شوراي نظارت

-

- پست: 522
- تاریخ عضویت: سهشنبه ۷ فروردین ۱۳۸۶, ۹:۳۶ ق.ظ
- محل اقامت: ایران
- سپاسهای ارسالی: 11 بار
- سپاسهای دریافتی: 763 بار
- تماس:
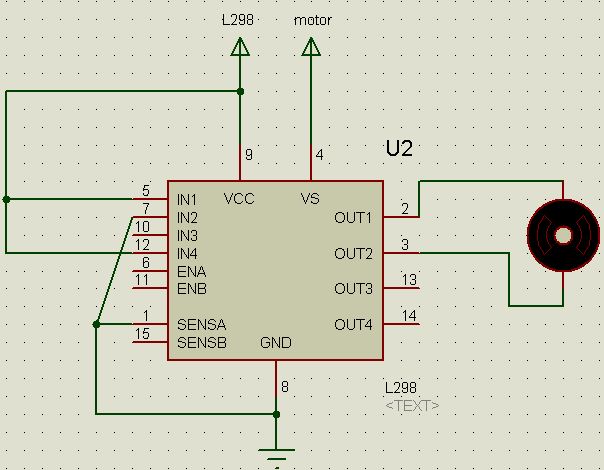
تشریح پایه های درایور موتور ال 298
Pin 1
CURRENT SENSING A
از این پایه جهت کنترل جریان موتور A استفاده می گردد. همچنین می توان این پایه را به صورت مستقیم به خط منفی مدار GND اتصال داد که در این صورت کنترلی بر روی جریان وجود ندارد.
Pin 2
OUTPUT 1
این پایه به یکی از ترمینالهای موتور A متصل می گردد . همچنین دیودها نیز جهت حفاظت به همین پایه متصل می شوند . ( به نقشه مدار توجه کنید )
Pin 3
OUTPUT 2
این پین به ترمینال دیگر موتور A متصل شده و دیودها نیز مانند نقشه به آن متصل می گردند.
Pin 4
SUPPLY VOLTAGE
به پایه باید ولتاژ مورد نظر خود جهت اعمال به موتورها را متصل نمایید. این ولتاژ با توجه به موتورهای مورد استفاده شما حداکثر تا 46 ولت می تواند افزایش یابد. به برای ساخت رباتهای کوچک به طور معمول بین 6 تا 12 ولت است.
Pin 5
INPUT 1 TTL Compatible Inputs 1 to drive Motor A.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 7 می توانند جهت گردش موتور را مشخص نمایند.
Pin 6
ENABLE A TTL Compatible Enable Input for Motor A.
این پایه جهت روشن و خاموش کردن موتور A و در بیشتر مواقع جهت اعمل فرکانس PWM به موتور استفاده می گردد. پنج ولت موتور را روشن و صفر موتور را خاموش می کند.
Pin 7
INPUT 2 TTL Compatible Inputs 2 to drive Motor A.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 5 می توانند جهت گردش موتور را مشخص نمایند.
Pin 8
GND
اتصال به خط منفی مدار GND
Pin 9
LOGIC SUPPLY VOLTAGE
اتصال به 5 تا 7 ولت
Pin10
INPUT 3 TTL Compatible Inputs 1 to drive Motor B.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 12 می توانند جهت گردش موتور B را مشخص نمایند.
Pin 11
ENABLE B TTL Compatible Enable Input for Motor B.
این پایه جهت روشن و خاموش کردن موتور B و در بیشتر مواقع جهت اعمل فرکانس PWM به موتور استفاده می گردد. پنج ولت موتور را روشن و صفر موتور را خاموش می کند.
Pin 12
INPUT 4 TTL Compatible Inputs 2 to drive Motor B.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 10 می توانند جهت گردش موتور B را مشخص نمایند.
Pin 13
OUTPUT 3
این پایه به یکی از ترمینالهای موتور B متصل می گردد . همچنین دیودها نیز جهت حفاظت به همین پایه متصل می شوند . ( به نقشه مدار توجه کنید )
Pin 14
OUTPUT 4
این ترمینال دیگر موتور B متصل می گردد . همچنین دیودها نیز جهت حفاظت به همین پایه متصل می شوند . ( به نقشه مدار توجه کنید )
Pin 15
CURRENT SENSING B
از این پایه جهت کنترل جریان موتور B استفاده می گردد. همچنین می توان این پایه را به صورت مستقیم به خط منفی مدار GND اتصال داد که در این صورت کنترلی بر روی جریان وجود ندارد.
Pin 1
CURRENT SENSING A
از این پایه جهت کنترل جریان موتور A استفاده می گردد. همچنین می توان این پایه را به صورت مستقیم به خط منفی مدار GND اتصال داد که در این صورت کنترلی بر روی جریان وجود ندارد.
Pin 2
OUTPUT 1
این پایه به یکی از ترمینالهای موتور A متصل می گردد . همچنین دیودها نیز جهت حفاظت به همین پایه متصل می شوند . ( به نقشه مدار توجه کنید )
Pin 3
OUTPUT 2
این پین به ترمینال دیگر موتور A متصل شده و دیودها نیز مانند نقشه به آن متصل می گردند.
Pin 4
SUPPLY VOLTAGE
به پایه باید ولتاژ مورد نظر خود جهت اعمال به موتورها را متصل نمایید. این ولتاژ با توجه به موتورهای مورد استفاده شما حداکثر تا 46 ولت می تواند افزایش یابد. به برای ساخت رباتهای کوچک به طور معمول بین 6 تا 12 ولت است.
Pin 5
INPUT 1 TTL Compatible Inputs 1 to drive Motor A.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 7 می توانند جهت گردش موتور را مشخص نمایند.
Pin 6
ENABLE A TTL Compatible Enable Input for Motor A.
این پایه جهت روشن و خاموش کردن موتور A و در بیشتر مواقع جهت اعمل فرکانس PWM به موتور استفاده می گردد. پنج ولت موتور را روشن و صفر موتور را خاموش می کند.
Pin 7
INPUT 2 TTL Compatible Inputs 2 to drive Motor A.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 5 می توانند جهت گردش موتور را مشخص نمایند.
Pin 8
GND
اتصال به خط منفی مدار GND
Pin 9
LOGIC SUPPLY VOLTAGE
اتصال به 5 تا 7 ولت
Pin10
INPUT 3 TTL Compatible Inputs 1 to drive Motor B.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 12 می توانند جهت گردش موتور B را مشخص نمایند.
Pin 11
ENABLE B TTL Compatible Enable Input for Motor B.
این پایه جهت روشن و خاموش کردن موتور B و در بیشتر مواقع جهت اعمل فرکانس PWM به موتور استفاده می گردد. پنج ولت موتور را روشن و صفر موتور را خاموش می کند.
Pin 12
INPUT 4 TTL Compatible Inputs 2 to drive Motor B.
این پایه باید به صفر یا پنج ولت متصل گردد که همراه با پین 10 می توانند جهت گردش موتور B را مشخص نمایند.
Pin 13
OUTPUT 3
این پایه به یکی از ترمینالهای موتور B متصل می گردد . همچنین دیودها نیز جهت حفاظت به همین پایه متصل می شوند . ( به نقشه مدار توجه کنید )
Pin 14
OUTPUT 4
این ترمینال دیگر موتور B متصل می گردد . همچنین دیودها نیز جهت حفاظت به همین پایه متصل می شوند . ( به نقشه مدار توجه کنید )
Pin 15
CURRENT SENSING B
از این پایه جهت کنترل جریان موتور B استفاده می گردد. همچنین می توان این پایه را به صورت مستقیم به خط منفی مدار GND اتصال داد که در این صورت کنترلی بر روی جریان وجود ندارد.
هرکه را اسرار حق آموختند
مهر کردند و دهانش دوختند
مهر کردند و دهانش دوختند



-

- پست: 207
- تاریخ عضویت: شنبه ۲۸ اردیبهشت ۱۳۸۷, ۴:۴۳ ب.ظ
- سپاسهای ارسالی: 182 بار
- سپاسهای دریافتی: 131 بار
Re: L298
لطفا یه مقدار دقیق تر توضیح بدین.مثلا دو تا منبع تغذیه داریم 5ولت و 12 ولت.و یه موتور 12 ولت هم داریم.جاهایی که گفته شده به زمین وصل می کنیم یعنی به منفی کدوم منبع تغذیه متصل می کنیم؟ ممنون میشم اگه با شکل توضیح بدین.

-

- پست: 7545
- تاریخ عضویت: سهشنبه ۲۶ آذر ۱۳۸۷, ۴:۲۰ ب.ظ
- سپاسهای ارسالی: 9280 بار
- سپاسهای دریافتی: 22106 بار
Re: L298
با سلام
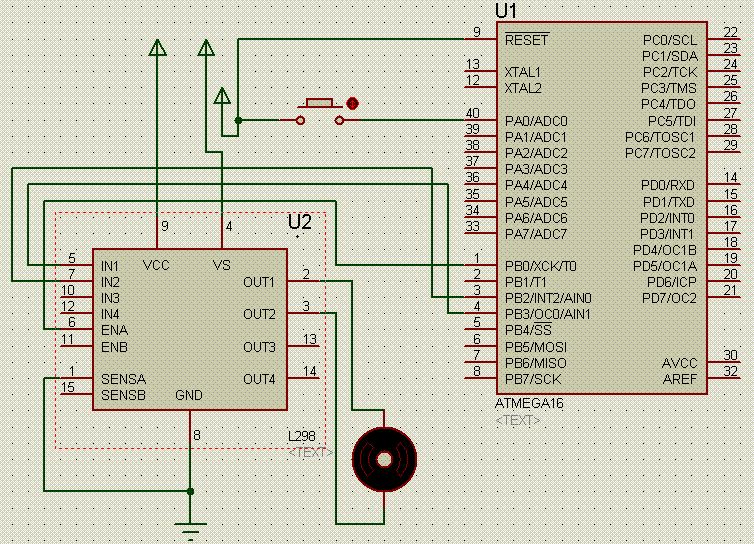
نقشه راه اندازی موتور ربات با درایو L298 (همراه با تغذیه،و ملزومات مورد لازم )
در این مدار 4 LED به کار رفته،که در صورت که جریان ها تغییر کنند،روشن میشوند(حرکت عقب گرد و جلوگرد، را با روشن شدن LED نمایان می کنند)
 .
.
نقشه راه اندازی موتور ربات با درایو L298 (همراه با تغذیه،و ملزومات مورد لازم )
در این مدار 4 LED به کار رفته،که در صورت که جریان ها تغییر کنند،روشن میشوند(حرکت عقب گرد و جلوگرد، را با روشن شدن LED نمایان می کنند)
. "قرآن"(کلام خدا) ...راه سعادت و خوشبختی.
با عرض پوزش،دیگر در انجمن حضور ندارم،که به پیام ها پاسخ بدم.